Notre projet s’inscrit dans le cadre de notre seconde année au sein du département informatique de l’INSA de Rennes. Toujours dans le but de nous préparer au travail d’ingénieur, il a pour objectif de nous confronter à des problématiques aussi bien d’ordre technique que logistique en nous mettant au défi de mener à bien chaque étape du processus jusqu’à sa concrétisation.
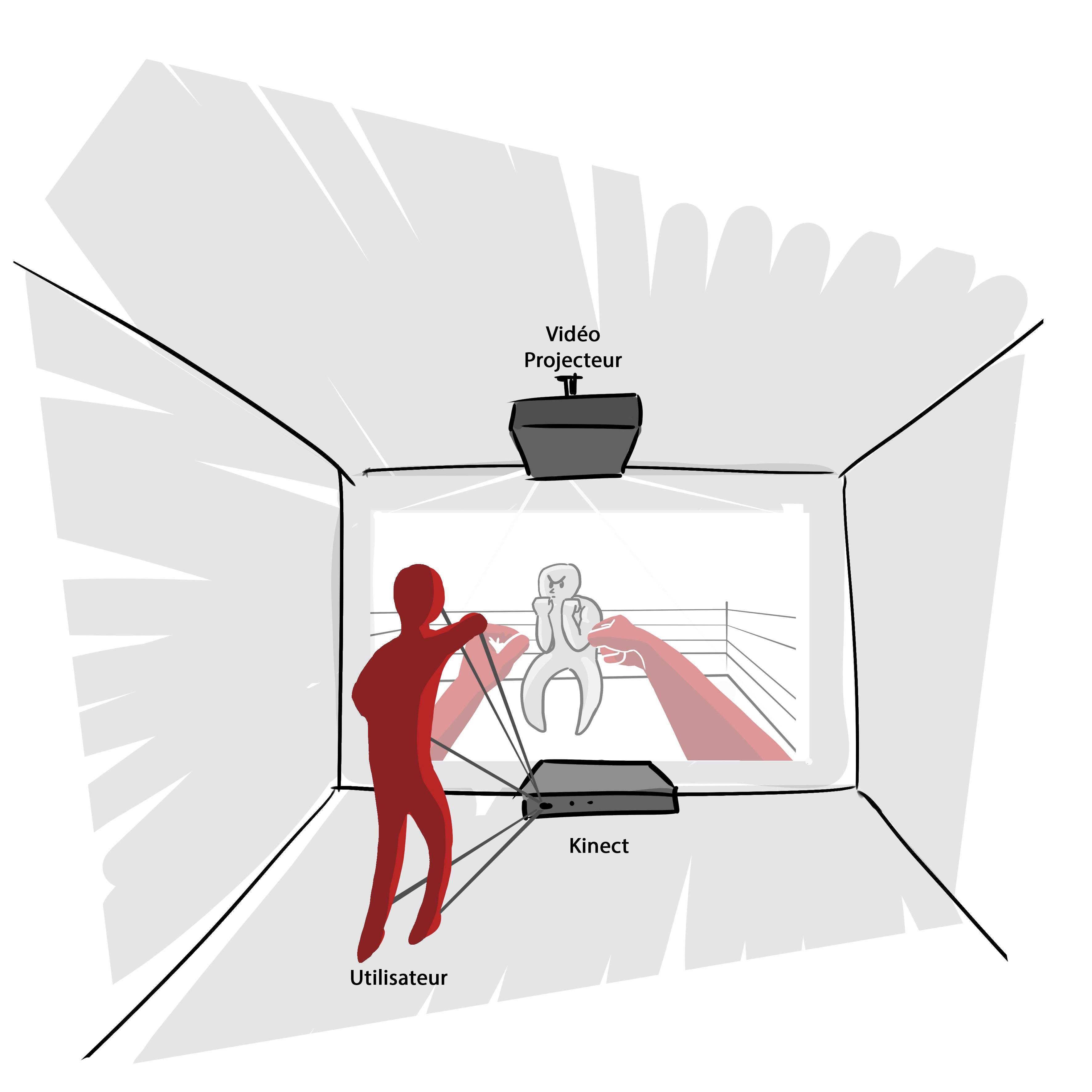
La reconnaissance de gestes, de par les nombreuses portes qu’elle ouvre, est aujourd’hui un domaine de recherche très actif. C’est dans ce contexte qu’il nous a été chargé de démontrer et mettre en évidence les capacités d’un moteur de reconnaissance de gestes 3D à l’état de l’art mondial. Un moteur de reconnaissance gestuelle, souvent désigné par le terme de moteur, est un logiciel prenant en entrée les différentes positions d’un corps au cours du temps et donnant en sortie le nom d’un geste si celui-ci a été reconnu. Effectué dans les équipes de recherche IntuiDoc et MimeTIC du laboratoire de l’IRISA, le moteur est le fruit d’une thèse et fait déjà l’objet d’un TP dans la cadre du module AMRG proposé aux 5ème années du département.
Le projet est séparé en trois grandes parties:
 La réalisation d’un démonstrateur visant un public formé de chercheurs
La réalisation d’un démonstrateur visant un public formé de chercheurs La réalisation d'un framework pédagogique dont l’objectif sera de servir de support pour le TP du module AMRG de
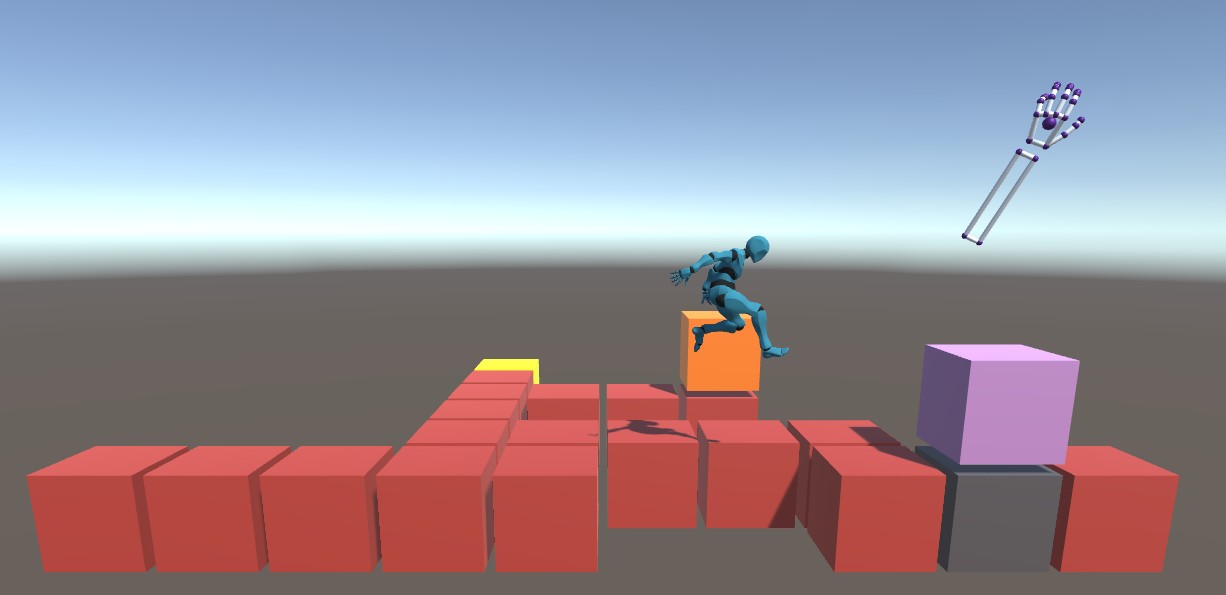
5ème année. Le framework prendra forme autour d’un jeu de plateformes qui est accompagné d’un sujet
de TP. Ce jeu dépasse la portée du TP dans l’intérêt de présenter celui-ci comme un second
démonstrateur du moteur.
La réalisation d'un framework pédagogique dont l’objectif sera de servir de support pour le TP du module AMRG de
5ème année. Le framework prendra forme autour d’un jeu de plateformes qui est accompagné d’un sujet
de TP. Ce jeu dépasse la portée du TP dans l’intérêt de présenter celui-ci comme un second
démonstrateur du moteur. Une partie transversale qui regroupe les fonctionnalités
qui permettent de mettre en valeur le moteur de reconnaissance de geste 3D et le configurer à nos souhaits.
Une partie transversale qui regroupe les fonctionnalités
qui permettent de mettre en valeur le moteur de reconnaissance de geste 3D et le configurer à nos souhaits.
Our project is part of out second year in the IT department of INSA Rennes. Always in order to prepare us for our future engineer work, it's goal is to confront us with various tehnical problems as well as logistical problems by challenging us to carry out each step of the process to its realization.
The gesture recognition, through the many doors it opens, is now a very active research domain. It is in this context that we have been charged to demonstrate and highlight the capacities of a 3D gesture recognition engine at the worldwide state of the art. A gesture recognition engine, often called "engine", is a software which takes as an input different positions of a human body over time and gives as output the name of a gesture if the given gesture has been recognized. Accomplished in the research teams named IntuiDoc and MimeTIC of the research laboratories of IRISA, the engine is the fruit of a thesis and is already the subject of a practical work of AMRG module proposed to the 5th year of the department.
The project is divided into three main parts:
- The realization of a demonstrator targeting the public formed of researchers
- The realization of a educational framework of which the objective will be to support the practical work of AMRG module for the 5th year The framework will be a platformer accompanied by a prectical work subject. This game is beyond the scope of the practical work in the interest of presenting it as a second demonstrator of the engine.
-
A transversal part which regroups the features that let us highlight the 3D gesture recognition engine and configure it as we wish.